My Projects
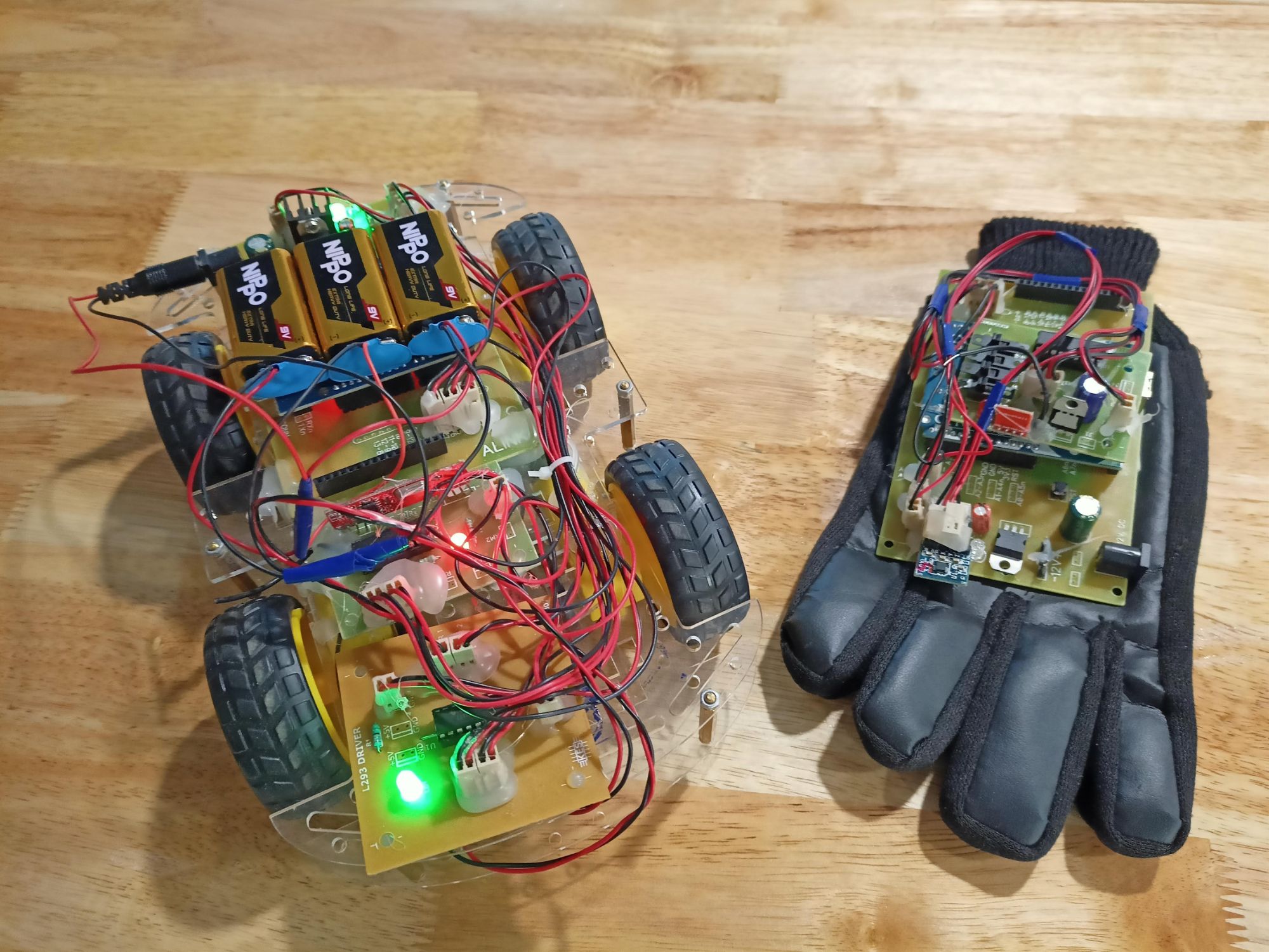


Hand Gesture Controlled Car
The main objective of the project work is to control robot with gestures using hand. There are two main components of the system: The ac- accelerometer depends upon the gestures of the hand. Through accelerometer, a passage of data signal is received and it is processed with the help-of Arduino microcontroller. The microcontroller gives command to the robot to move in the desired direction. The basic working principle for the robot is passage of the data signals of accelerometer readings to the Arduino board fitted on the bot. The program compiled in that Arduino runs according to that value, which make the bot function accordingly. While we have used two-axis accelerometer. In which, one axis will control the speed in forward or backward direction and other axis will control the turning mechanism. Accelerometer-based gesture control is studied as a supplementary or an alternative interaction modality.